Comment fonctionne mon aspirateur robot ?
Situation problème :
Depuis son accident et son handicap, Yohann a du mal à réaliser certaines tâches
domestiques.
Parmi ces tâches devenues difficiles, celle du nettoyage des sols est particulièrement
problématique.
En effet, comment nettoyer un sol quand on est dans un fauteuil roulant ?
Pouvons-nous aider Yohann ?
Existe-t-il des solutions techniques, des objets techniques pour l’assister dans cette corvée ?
PRÉSENTATION GÉNÉRALE
L'aspirateur robot est équipé des dernières innovations pour plus de performances, de fiabilité et de longévité.
Clique sur l'image pour lire la maquette numérique 3D :
Caractéristiques standard
- Un aspirateur compact et efficace qui enlève les saletés, la poussière, les poils d'animaux et bien d'autres choses des moquettes et des sols durs.
- Nettoie toute la surface du sol, au-dessous et autour des meubles, ainsi que le long des murs.
- S'adapte automatiquement pour passer des tapis aux sols durs et inversement.
- Détecte les zones particulièrement sales et consacre plus de temps à leur nettoyage.
- Le nettoyage ciblé permet de nettoyer rapidement les amas de poussière et de saletés.
- Détecte et évite automatiquement les escaliers et autres descentes
- Détecte et évite automatiquement les obstacles.
- Facile d'utilisation ! Appuyez simplement sur un bouton, le robot s'occupe du reste !
Fonctionnalités avancées
- Retourne par lui-même à la station de recharge automatique pour se brancher et se recharger entre les nettoyages.
- Les brosses contrarotatives plus rapides et au design amélioré ramassent plus de poils et de débris, et sont plus faciles à démonter et à nettoyer.
- Le filtre, lui aussi amélioré, capture plus de poussières et d'allergènes et le réservoir accueille plus de débris.
- La technologie anti-nœud a été perfectionnée pour éviter que le Roomba ne se coince dans des fils ou les franges des tapis.
- La brosse latérale du robot a été repensée pour nettoyer les coins et les bords de façon encore plus efficace.
PRINCIPE DE DÉPLACEMENT
L'aspirateur robot est muni de deux roues motrices arrières et d’une roue “folle” à l’avant tournant librement sur elle même.
|
Roue motrice avec motoréducteur quatre étages : Les deux roues motrices arrières sont indépendantes ce qui permet de faire tourner le robot sur lui même en faisant tourner les deux moteurs dans un sens différent (système “char”). Chaque roue est équipée d'un codeur simple permettant de compter les tours de roue. |
L'aspirateur robot est doté d'un système de nettoyage breveté à trois phases :
Les brosses à mouvement latéral inversé et à double action ramassent les débris pendant que l'aspirateur élimine la poussière.
L'aspirateur robot est alimenté par une batterie nimh rechargeable. Elle peut durer des centaines de cycles de nettoyage si elle est bien entretenue.
Le chargement du robot peut se faire de deux manières :
L'apirateur revient à sa base à la fin du cycle de nettoyage ou lorsque sa batterie est faible.
|
Le robot est équipé de 3 récepteurs infrarouges, un omnidirictionnel et deux sur son pare-choc avant.
PRINCIPE : 1 - Diffusion d'un faisseau infrarouge omnidirectionnel pour localiser la base.
2 - Quand le robot est dans la zone Rouge il tourne à gauche. 3 - Quand le robot est dans la zone Verte il tourne à droite. 4 - Quand le robot est dans la zone commune Rouge & Verte il avance tout droit |
SYSTÈME DE DÉTECTION D'OBSTACLE
| L'aspirateur robot identifie les meubles et autres obstacles, ralentit lorsqu'il s'en approche, puis touche l'obstacle en douceur avec son pare-chocs avant de changer de direction. |
| Capteur Infra rouge | Capteur à contact |
| Six capteurs infrarouge, répartis sur l'avant du robot, donnent une information sur la distance d'un obstacle | Un pare-choc équipé de trois contacts mécaniques renseignent sur un choc de face, du côté droit ou du côté gauche |
| L'aspirateur robot sait lorsqu'il s'approche d'escaliers et autres descentes. Il nettoie jusqu'au bord, puis change de direction automatiquement et en toute sécurité afin d'éviter les chutes. |
Quatre capteurs infrarouge sont répartis sous l'avant du robot, donnant des informations sur...
- La couleur du sol (capteur analogique)
- La présence de vide (capteur numérique)
Programmation de l'aspirateur
Un aspirateur automatique se déplace pour aspirer les poussières de la pièce. Il a besoin d’un programme optimal pour se déplacer en passant partout le plus rapidement possible.
Afin de commander les déplacements et les rendre automatique, il faut créer un programme.
Etape 1 : les déplacements de l'aspirateur
Situation(s) à problème(s)
Pour comprendre comment se déplace l'aspirateur
Dessiner les déplacements en utilisant les notions de séquences d'instructions et de boucles
Travail à faire :
(vous pouvez trouvez les fichiers dans commun)
Etape 2 : L’aspirateur dans la pièce
Déplacements simples
Pour bien commencer tu dois refaire les exercices de base vus en cours voici le terrain ainsi que l'aspirateur.
Aide pense à utiliser le crayon pour marquer tes déplacements et regarder si il y a plusieurs costumes pour allumer ton robot aspirateur en vert ou en bleu
Le robot aspirateur + poussières
Téléchargez le terrain de jeu de l’aspirateur et compléter les scripts !!

Description du scénario :
L’aspirateur se déplace tout seul. Si il touche des meubles ou le bord, il change de direction. On peut le diriger suivant les flèches du clavier.
Attention : Si il touche l’escalier, il tombe...
Les poussières disparaissent si l’aspirateur les touches. Un message gagné apparaît.
aide pour les scripts à reproduire :

script de de l'aspirateur
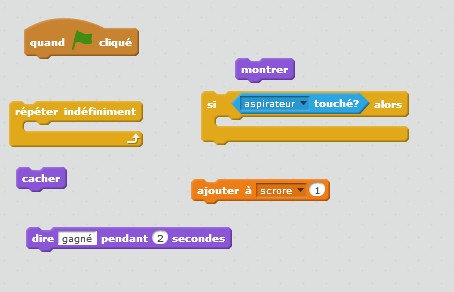
script des poussières